|
|
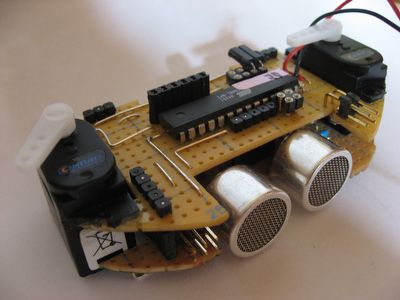
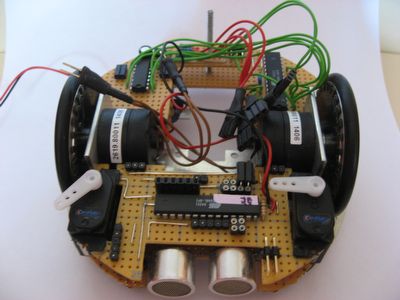
Fronteinheit des Roboters. Der ATMega8 (1Mhz) überprüft die Umgebung per Ultraschall. Zusätzlich werden zwei Servos angesteuert um die in einer späteren Ausbaustufe eingesetzen Infrarot-Distanz Sensoren zu drehen. Das Modul wurde so aufgebaut, dass nur zwei Leitungen benötigt werden, um Befehle und Daten mit einem zentralen Modul auszutauschen. |
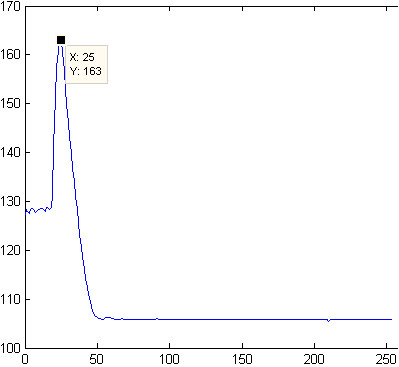
| Der Verlauf des Ultraschallempfängers, wie er vom Analog-Digital-Wandler aufgenommen wurde. Hier befindet sich das Objekt in einer Entfernung von 15cm. Der ADC sollte mit 50kHz-200kHz abgefragt werden, was bei 1 Mhz internem Takt einen Divisor von 20-5 bedeutet. Vom ADC werden nur die 8 höherwertigen Bits für die Weiterverarbeitung verwendet (ADCH, links ausgerichtet). |
|
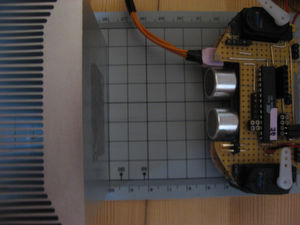
| Der Versuchsaufbau für eine Entfernung von 5cm. Der Schall wird an einem massiven Objekt (Aluminium-Kühlkörper) reflektiert. Um Reflexion vom Untergrund zu vermeiden, wurde eine Gummimatte untergelegt. |
|

|
Die Schnittstelle zum Benutzer. Ein Atmega8 steuert das LCD im 4-Bit Modus an.
Ein Infrarotsensor nimmt die Befehle einer handelsübliche Fernbedienung entgegen.
Dafür wurde eine vereinfachte RC5-Dekodierung verwendet. Ausser der Stromversorgung werden für dieses Modul nur zwei Leitungen benötigt, um Daten mit einer zentralen Instanz auszutauschen. Zusätzlich können über 6 Pins weitere IO-Einheiten angeschlossen werden. |
|
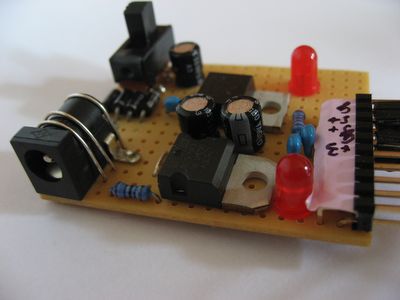
Zum Testen wurde ein Modul erstellt, welches 3.3V sowie 5.0V stabil bereitstellt. Links muss nur ein Netzteil mit mindestens 1A angeschlossen werden. |
|
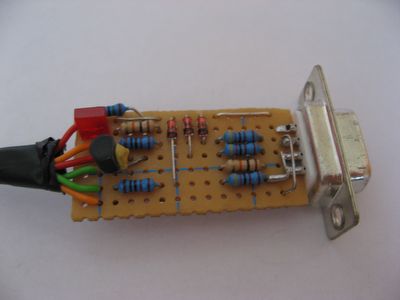
Die oben beschriebenen Module werden jeweils einzeln über diesen seriellen Adapter programmiert. Die Bauanleitung gibt's beim 'Pony'. Eine LED gibt Auskunft darüber, ob der Stecker korrekt am Roboter angeschlossen ist. |
|
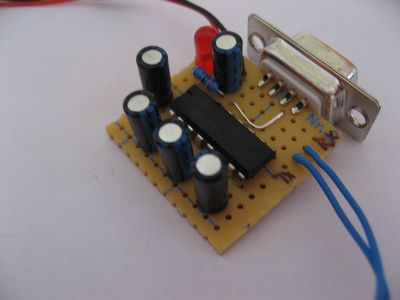
Gerade für die Auswertung von Daten ist während der Entwicklungszeit ein handelsüblicher PC sinnvoll. Über den MAX232 wird diese Verbindung geschaffen. Der Baustein erzeugt aus den 5V des Roboters die 12V für die serielle Schnittstelle. Dieses Modul benötigt ebenfalls nur 4 Leitungen: 2x Strom sowie RX und TX. |
|
Das gesamte System in der noch unvollständigen Ausbaustufe. Die Mechanik wurde in einer Fachzeitschrift detailiert beschrieben. Der Kabelwust im oberen Teil stammt von einem älteren Modul (ATMEGA8 + L293D). Dieses nimmt die über Infrarotsensoren die Umdrehungen des Rades auf (Rad-encoder) und liefert dementsprechend geregelte Steuerbefehle an den Motortreiber. Auch hier reichen zwei Leitungen um diesem Modul Befehle zu erteilen. (z.B. fahre eine Kreiskurve mit Radius 40cm von 75 Grad nach links). |